DRI-EO is a stabilized optoelectronic system design for detection, recognition and identification. It is quipped with VIS day camera, MWIR or LWIR infrared surveillance camera, low light SWIR camera, laser designator for missle guidance and laser range finder. Target tracking, geo-pointing, a 30x optical continuous zoom, radiometry and isotherm functionality, robust 4 axis stabilization, integrated INS/GPS allow to use this system in wide range of militry and industrial missions, including surveillance, reconnaissance, search and rescue. This system was designed for use onboard ground, sea and aircraft vehicles. Thanks to the 6DOF hybrid vibration damping system (active and passive), DRI-EO stabilizes all optical devices, ensuring a stable image and laser beam.


The DRI-INS is a high performance GNSS-Aided Inertial Navigation System (GNSS/INS) that incorporate three gyroscopes, three accelerometers and barometric sensor. The DRI-INS has integrated multiband RTK technology for centimeter level accuracy. Sensor fusion done by Kalman Filter provides the user with stable and robust position, velocity and attitude data. Module can be integrated with two GNSS antennas, providing precise heading information.

DRI-GNSS-DEV is a multi-band GNSS hardware receiver for software-defined radio (SDR) development and GNSS signal analysis. It enables PVT algorithms rapid prototyping, GNSS signals search and support for multiple constellations including GPS, Galileo, GLONASS and BeiDou. By combining three modules, the system can be use for testing signal interference mitigation, spoofing and jamming detection algorithms.

DRI-RF are series of high power radio systems with support for band VHF, UHF and S. Device is capable to deliver best performance in long range outdoor application within 80 km LOS range. The variety of available bandwidths, MIMO technology, data encryption and selectable transmitting powers allows the product to be adapted to various applications.

DRI-SENS-DEV is a 16-channel module for monitoring standard analog signals: current (4-20 mA) and voltage (0-10 V). It can be used to monitor flow, pressure, temperature, level, etc. Measurement data is available via CAN bus, serial port, Ethernet, or WiFi.

Get your vehicle moving! This driver makes it easy to control two high-power DC or BLDC motors. It also offer position, velocity and current-sense feedback and accept ultrasonic PWM frequencies for quieter operation.

This motor driver was designed with the European Space Agency lunar mission in mind. It uses radiation-hardened components, has passed vibration testing, and has been tested at temperatures up to +125°C.
The DRI-SSL module is an LED light source used in schlieren and shadowgraph applications. The module can operate in two modes: continuous or pulsed up to 200 kHz. The LED power and wavelength are user-defined. The standard LED power is 150 W and the wavelength is 460 nm.

We design customized, light-weight ready to use embedded control system for a wide range of industrial applications. With our ARM Cortex or FPGA based devices and open source real time operating system – RTOS, you are ready to shape the system to your needs.
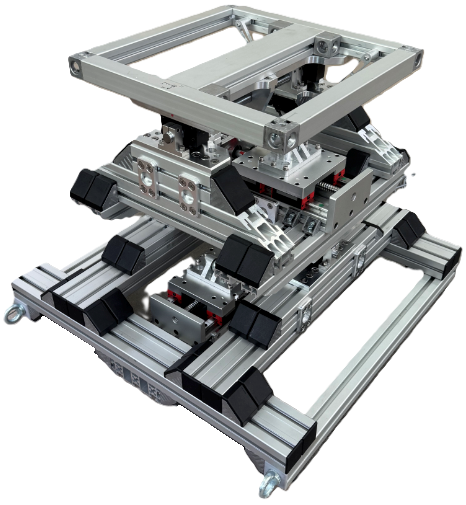
This 2 DOF stabilization system is used to test the imaging effectiveness of opto-electronic systems and UAV landing maneuvers by simulating interference in various operating environments such as sea, land or air. It also can be used to ensure continuous antenna alignment with low orbit satellites by actively compensating for pitch and roll motion supporting a payload of 100 kg.
Multi-axis robotic arm is a ball screw driven linear actuator for linear guide rail. Customized travel length, pre-engineered with high performance motors allow to use the system in wide range of industrial application. These linear actuators robotic systems are ideal in a high speed multi-axes motion automation applications such as pick and place, assembly, inspection and many more.

DRI-ACS is a fast speed ultrasonic sensors based system dedicated to protection of autonomous vehicles accident prevention. Information about obstacles are processed in a real-time to produces information about obstacles in the environment.